同步定位和地图绘制 (SLAM) 是一项很有前途的技术,可用于改进自主系统的导航,帮助它们绘制周围环境的地图并跟踪其中的其他物体。到目前为止,它主要应用于地面车辆和移动机器人,但它也有可能扩展到航天器。
佐治亚理工学院 (Georgia Tech) 和美国宇航局戈达德太空飞行中心的研究人员最近创建了 AstroSLAM,这是一种基于 SLAM 的算法,可以让航天器更加自主地导航。在arXiv上预发表的一篇论文中介绍的新解决方案在空间系统围绕小天体(例如小行星)导航的情况下特别有用。
“我们最近的工作是 NASA 资助的 ESI(早期创新)计划的一部分,该计划的目标是使未来用于深空任务(例如,访问和测量小行星)的航天器更加自主,”Panagiotis Tsiotras,其中一位进行这项研究的研究人员告诉 TechXplore。
“这个问题非常有趣,因为由于距离地球很远,很难以实时方式在小行星周围执行所需的机动动作。相反,目前的过程需要地面上有大量的人类操作员将从航天器捕获的图像下行传输并离线分析它们以创建数字地形图,这相当于仔细编排航天器的机动动作。”
确保航天器以所需的方式绕小行星移动对于地球上的人类代理人来说是一项艰巨、乏味且耗时的任务。因此,一个能够自主重建附近小行星形状并在地球干预最少的情况下导航航天器的模型将非常有价值,因为它可以促进并有可能加快深空任务。
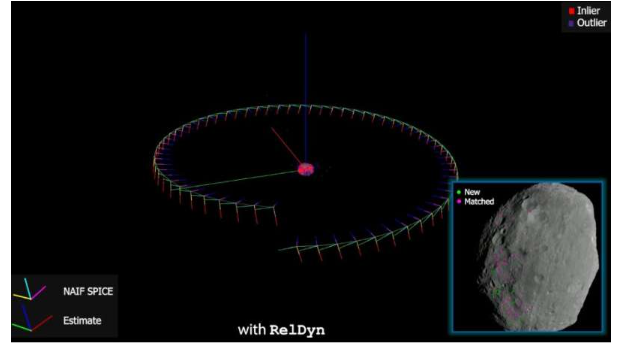
AstroSLAM 是由 Tsiotras 和他的同事开发的解决方案,可以自主生成航天器相对于附近小行星或其他小天体的位置和方向。它通过分析从航天器上的相机拍摄的一系列图像来实现这一点,因为它正在绕着感兴趣的天体运行。
“AstroSLAM,顾名思义,是基于 SLAM 的,这种方法迄今已在地面移动机器人中取得巨大成功,但我们没有将其扩展到太空环境,”Tsiotras 解释道。“我们的模型还可以生成小天体的 3D 形状表示,并估计它们的大小和引力参数。该算法是我的团队在基于视觉的航天器相对导航方面五年多工作的结晶,动力学和控制佐治亚理工学院的系统实验室。”